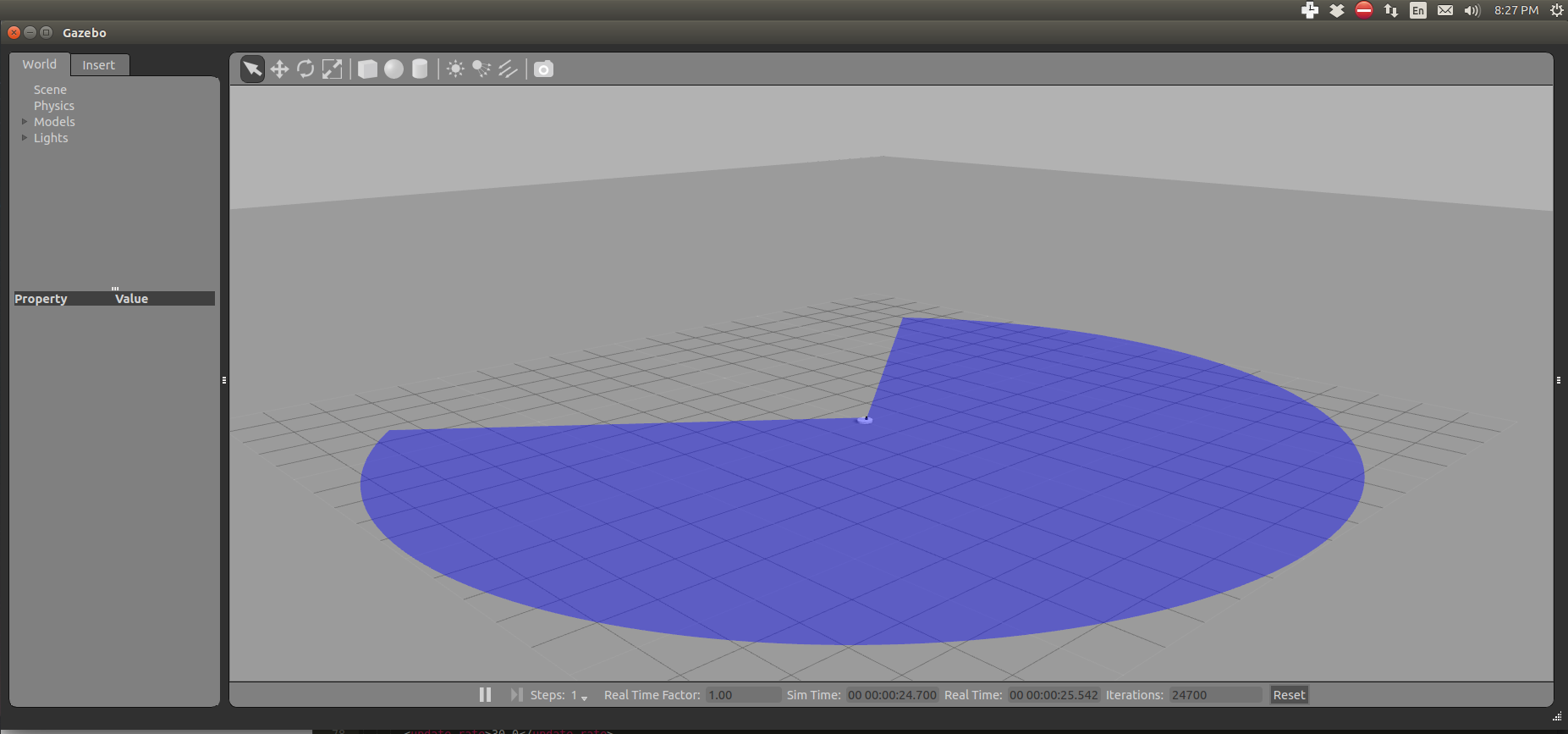
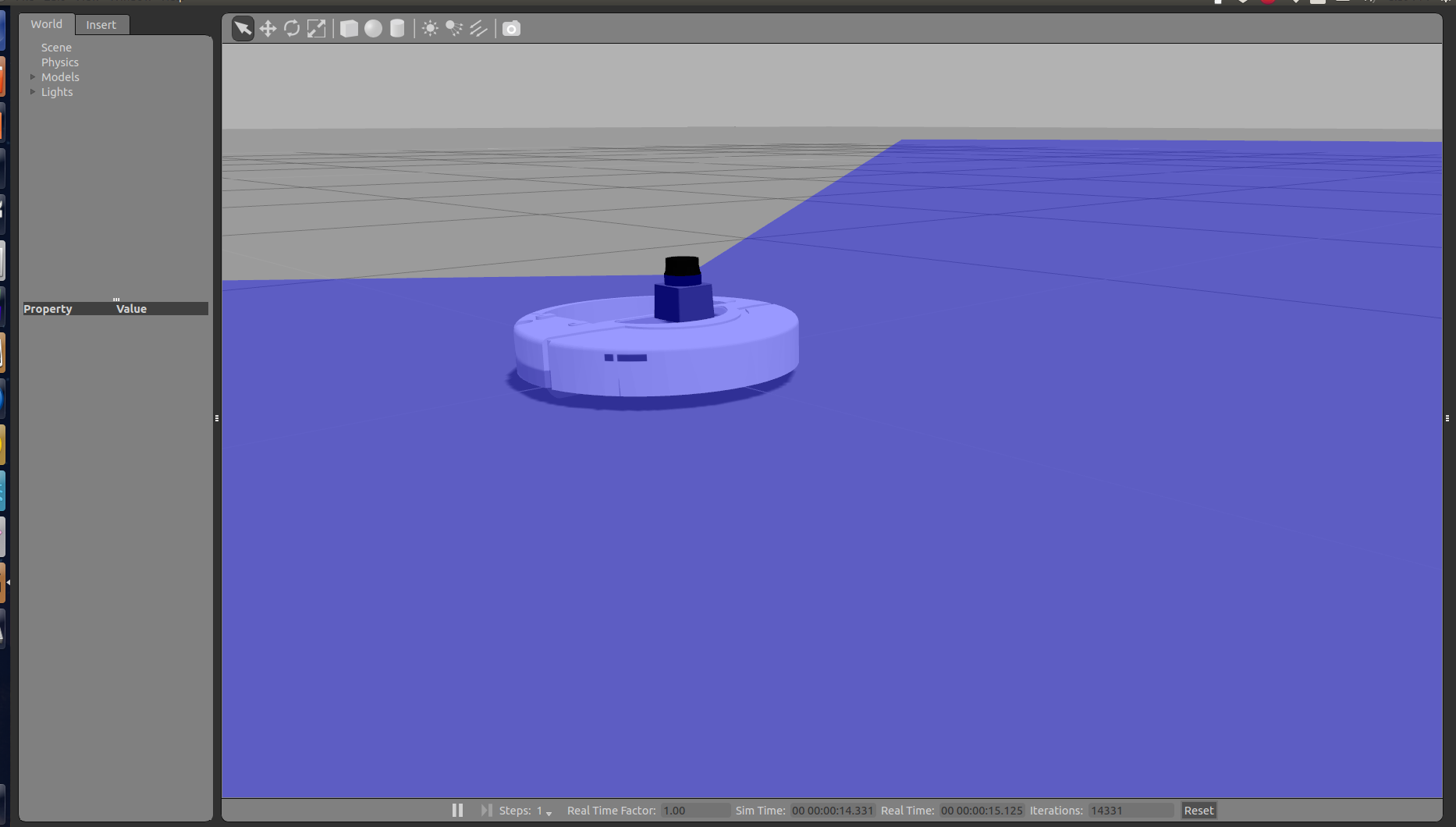
Following up from my previous post, I wanted to simulate an IRobot Create with a hokuyo laser mounted on it. I needed this to get my motion planning simulation up and running.
1. Follow the tutorial to get your create up and running in ROS/Gazebo.
2. If you downloaded the gazebo model repository from bitbucket, then simply copy the hokuyo folder to ~/.gazebo/models. Otherwise download just the hokuyo model and copy it to that location.
3. Use this modified IRobotCreateHokuyo. Download and rename extension from .txt to .sdf and move it to ~/catkin_ws/src/create/
4. In one terminal $roscore
5. In another terminal $roslaunch gazebo_ros empty_world.launch
6. In third terminal $ rosrun gazebo_ros spawn_model -file /home/<USERNAME>/catkin_ws/src/create/IRobotCreateHokuyo.sdf -sdf -model create
Note: The modified SDF adds a joint, link and the sensor model. It uses the laser plugin in gazebo.